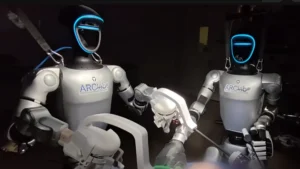

The long-standing cultural obsession with humanoid robots has traditionally followed a linear narrative: the closer a machine looks and moves like a human, the more advanced it is considered to be. From the mythological yearnings of Pinocchio to the cinematic pathos of Steven Spielberg’s A.I. Artificial Intelligence, the goal has been the perfect replication of the biological original. However, the current landscape of robotics research suggests a fundamental shift away from this mimicry. At the Consumer Electronics Show (CES) 2026, the unveiling of Boston Dynamics’ latest Atlas iterations showcased a departure from human constraints, featuring wrists that rotate indefinitely and torsos capable of spinning 180 degrees. This divergence highlights a new era in engineering where the human silhouette remains a useful template for navigating human-centric environments, but the internal mechanics are being redesigned to surpass biological limitations.
The Historical Context of Biomimetic Engineering
The impulse to copy nature is one of the oldest strategies in engineering. Historically, this approach has yielded mixed results. Successes typically occur when engineers isolate specific physical principles rather than attempting to replicate a form in its entirety. For instance, the development of dry adhesives was inspired by the microscopic hairs on gecko toe pads, and the reduction of drag in high-performance swimwear drew from the texture of sharkskin. In both cases, the "bio" was a starting point for "mimicry" that eventually became its own specialized technology.
Conversely, the history of aviation is littered with the failures of ornithopters—machines designed to fly by flapping wings like birds. For centuries, inventors believed that because birds flapped, humans must flap to achieve flight. It was not until the Wright brothers and their contemporaries shifted focus toward the principles of lift, drag, and control surfaces—moving away from the literal imitation of avian motion—that practical flight became possible. This historical lesson is now being applied to the field of humanoid robotics. While evolution has spent millions of years refining the human body for survival and reproduction, it did not design the human frame for 24-hour factory shifts or high-precision industrial welding.
The KAIST Hubo Lab and the Shift to Functional Design
At the forefront of this philosophical shift is the Hubo Lab at the Korea Advanced Institute of Science and Technology (KAIST). The lab gained international prominence in 2015 when its HUBO robot won the DARPA Robotics Challenge, a competition designed to test robot capabilities in disaster-response scenarios. Today, under the leadership of Professor Park Hae-won, the lab is pushing the boundaries of what legged robots can achieve by prioritizing task-specific physics over biological accuracy.
The research coming out of KAIST demonstrates a wide spectrum of non-humanoid capabilities within legged frameworks. This includes humanoid legs capable of sprinting at 12.6 kilometers per hour—a speed that requires a human to enter a full run, yet executed by the robot with a glide-like efficiency. Other projects include a quadruped robot capable of scaling vertical steel walls and a single-legged hopper that performs mid-air somersaults. Professor Park notes that while nature provides a useful performance benchmark, it should not be viewed as a rigid blueprint. If a wheel is more efficient for high-speed travel on flat ground, there is no logical reason to force a robot to run like a cheetah.
Bridging the Sim-to-Real Gap Through Hardware Innovation
One of the most significant hurdles in modern robotics is the "sim-to-real gap." This term refers to the discrepancy between how a robot performs in a controlled digital simulation and how it behaves in the physical world. While Artificial Intelligence (AI) and reinforcement learning have revolutionized how robots learn to walk and balance, the transition to hardware remains fraught with difficulty.
Professor Park’s team utilizes massive parallel simulations to train their agents. By running approximately 400 copies of a robot simultaneously in a virtual environment, researchers can compress a year’s worth of physical practice into just four hours of computing time. During this period, the AI learns through trial and error, falling thousands of times until it discovers the optimal balance and gait. However, simulations often fail to account for the nuances of physical reality, such as joint friction, sensor noise, and material elasticity.

To close this gap, the KAIST team has focused on hardware transparency. Traditional robots often use high-ratio gear reducers to increase the torque of their motors. While this makes the robot strong, it also introduces significant internal friction, making the joints stiff and difficult to move from the outside—a property known as low back-drivability. If a robot trained in a frictionless simulation encounters this resistance in the real world, its control algorithms often fail.
The KAIST solution involves the use of quasi-direct drive actuators. By reducing the gear ratio to roughly one-tenth of conventional levels and compensating with higher-output custom motors, the team has created hardware that behaves much more like the mathematical models used in simulations. This hardware-centric approach ensures that the "intelligence" developed in the virtual world is actually applicable to the physical machine.
Industrial Applications: The MARVEL Quadruped
The move toward functional robotics is best exemplified by the MARVEL robot (Magnetically Adhesive Robot for Versatile and Expeditious Locomotion). Developed for the maintenance of large-scale steel structures like shipyards, bridges, and oil tanks, MARVEL addresses a specific industrial need: the safety of human inspectors in "3D" (Dirty, Dangerous, and Difficult) jobs.
Rather than attempting to climb like a gecko or an insect—methods that struggle with the rust, paint, and grime found in industrial environments—MARVEL utilizes electro-permanent magnets (EPMs). Unlike standard electromagnets that require a constant flow of electricity to remain "on," EPMs only require a brief pulse of current to switch their magnetic state. This makes the robot energy-efficient and, more importantly, safe; if the power fails, the robot remains securely attached to the wall.

MARVEL’s specifications are a testament to the power of task-oriented design:
- Vertical Speed: 0.7 meters per second.
- Ceiling Speed: 0.5 meters per second (hanging upside down).
- Adhesive Force: Approximately 54 kilograms, allowing the robot to carry heavy sensors or maintenance tools.
- Response Time: Magnetic feet engage or disengage in five milliseconds.
This design bypasses the complexities of human-like hands or multi-purpose limbs in favor of a specialized locomotion system that excels in a specific, high-value environment.
The Economic and Demographic Drivers of Robotics
The push for more capable humanoid and legged robots is not merely an academic exercise; it is driven by urgent demographic shifts, particularly in South Korea. The nation currently faces one of the world’s most rapidly aging populations and a shrinking workforce. In the manufacturing sector—a cornerstone of the South Korean economy—there is a critical shortage of young workers willing to take on labor-intensive roles in assembly and welding.
Professor Park’s team is currently developing a humanoid robot specifically for the factory floor with a target payload capacity of 25 kilograms. This is a significant benchmark, as many current humanoid prototypes are limited to carrying only a few kilograms, rendering them impractical for heavy industrial use. By focusing on high-torque, quasi-direct drive actuators, the KAIST researchers aim to create a machine that can supplement the human workforce in environments originally designed for people, without being limited by human physical ceilings.

Broader Implications and the Future of Human-Robot Synergy
The trajectory of the robotics industry bears a striking resemblance to the evolution of the drone market. Initially restricted to military and specialized industrial use, drones became a massive consumer and commercial industry only after the hardware became accessible and a "killer app"—aerial photography—was identified. Professor Park suggests that humanoid robots may follow a similar path. While current research focuses on manufacturing and disaster response, the ultimate widespread adoption of these machines may be driven by a use case that has not yet been fully realized.
Furthermore, the philosophy of the KAIST Hubo Lab emphasizes that hardware and software must evolve in tandem. A common pitfall in modern engineering is the "software-first" mentality, where engineers attempt to fix mechanical deficiencies through more complex code. Professor Park argues that no amount of sophisticated AI can compensate for a loose screw or a poorly designed joint. True progress in robotics requires a deep understanding of the physical world—material science, motor dynamics, and structural integrity—combined with the latest advances in machine learning.
The goal is not to create a mechanical human, but to create a machine that can function within a human world while offering capabilities that humans lack. Whether it is a single-legged robot performing somersaults to test the limits of balance algorithms or a quadruped scaling a rusted shipyard wall, the future of robotics lies in the departure from our own image. By embracing the unique advantages of metal, electricity, and magnetic force, engineers are building a new class of tools designed to enrich human life and take on the burdens of the modern industrial age.
Summary of Technical Specifications and Research Milestones
| Feature | KAIST Sprinting Robot | MARVEL Quadruped | KAIST Hopping Robot |
|---|---|---|---|
| Top Speed | 12.6 km/h | 0.7 m/s (Vertical) | N/A (Hopping focus) |
| Primary Tech | Quasi-direct drive | Electro-permanent magnets | Reinforcement Learning |
| Key Achievement | High-speed bipedal gait | Vertical/Inverted locomotion | Mid-air somersaults |
| Payload Target | General Research | 54 kg (Adhesion) | Balance Stress Testing |
As the industry moves toward the late 2020s, the distinction between "human-like" and "human-functional" will continue to widen. The machines emerging from labs like KAIST represent a pragmatic middle ground: they possess the legs and torsos necessary to navigate our stairs and hallways, but they wield the strength and specialized sensors required to perform tasks that are too dangerous or exhausting for the biological frame. In this context, the robot does not compete with the human; it complements the human, fulfilling the original promise of the word "robot"—a worker designed to serve.