


The National Aeronautics and Space Administration (NASA) confirmed this week that its Mars Science Laboratory, better known as the Curiosity rover, has successfully extricated itself from a potentially mission-threatening predicament. On April 25, 2024, during a routine sampling operation on the Martian surface, the rover’s robotic arm became unexpectedly wedged into a large rock formation nicknamed "Atacama." The ensuing six-day standoff between human engineering and Martian geology required a series of complex, remote-controlled maneuvers to ensure the survival of the rover’s primary scientific instruments. While Curiosity has traversed the Red Planet for over a decade, this specific incident presented a unique mechanical challenge that tested the limits of the rover’s aging hardware and the ingenuity of its Earth-bound flight controllers at the Jet Propulsion Laboratory (JPL) in Southern California.
The Incident at Atacama: A Mechanical Anomaly
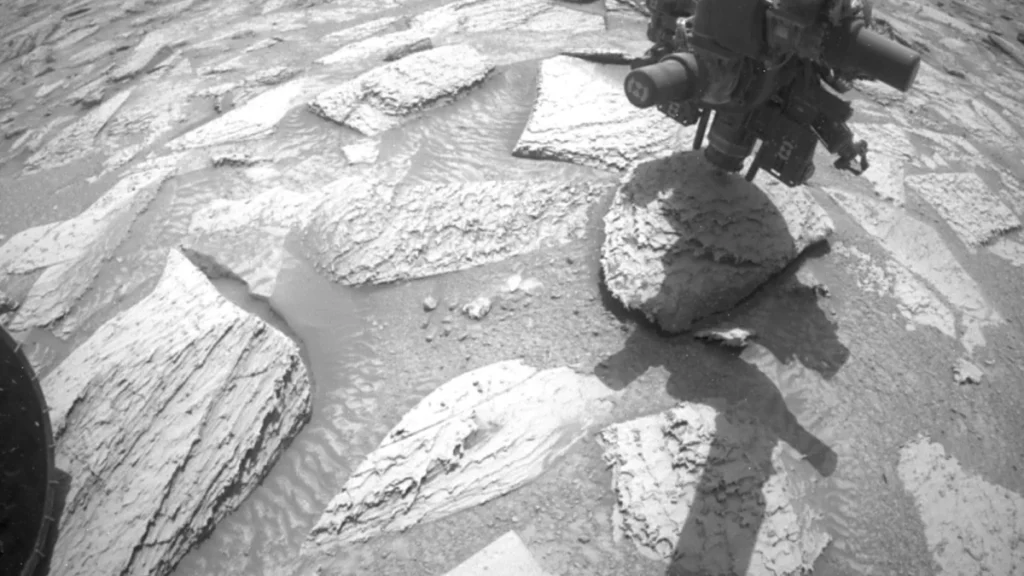
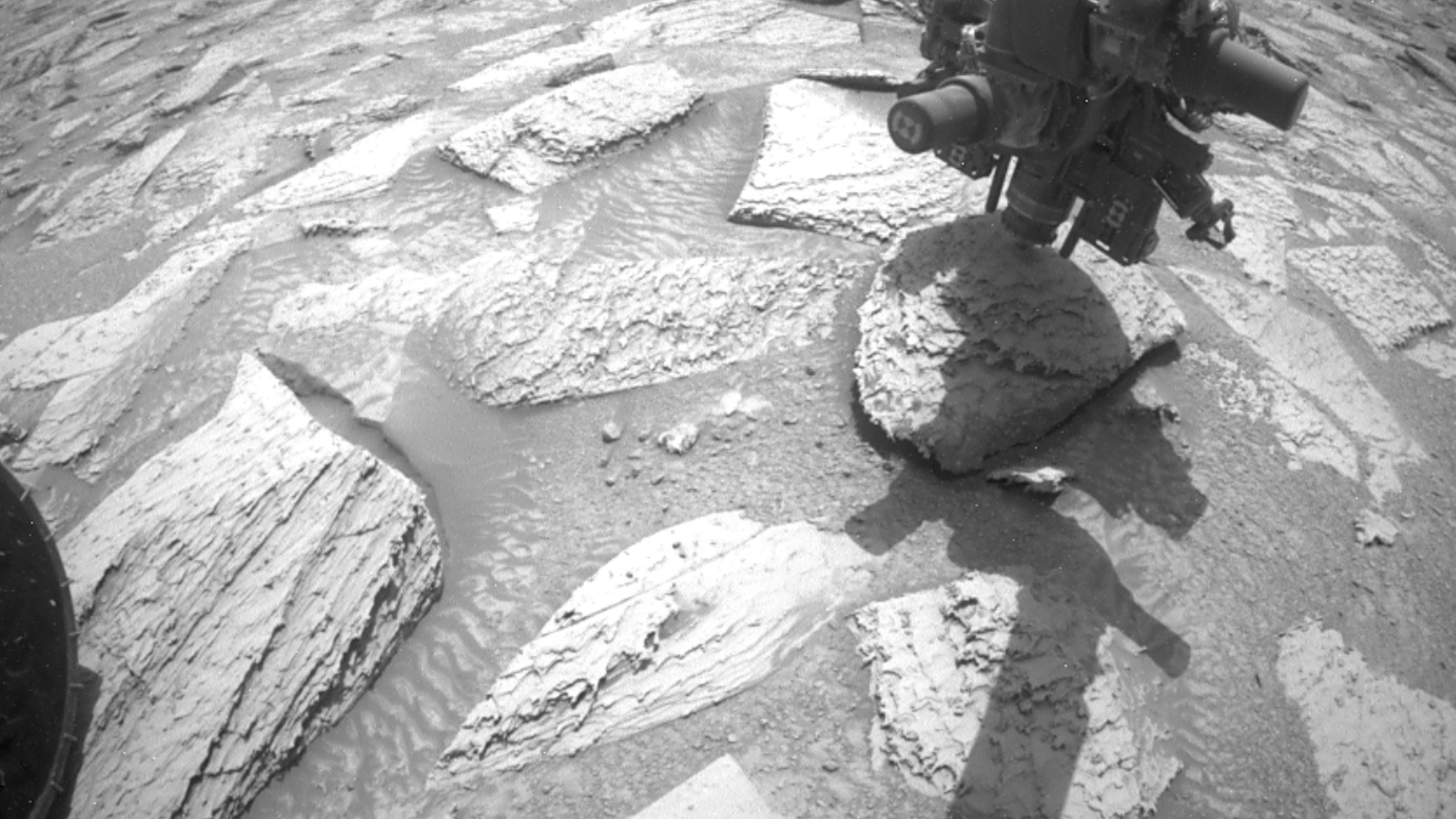
The complication began during what was intended to be a standard procedure in Curiosity’s ongoing exploration of the Gale Crater. The rover was instructed to deploy its rotary-percussive drill into Atacama, a geological feature measuring approximately 1.5 feet in width and six inches in thickness. Geologists on the mission team estimated the rock’s mass at approximately 28.6 pounds (13 kilograms). Under normal circumstances, Curiosity’s drill penetrates the surface of a target rock, collecting pulverized samples that are later delivered to the rover’s internal laboratories, the Sample Analysis at Mars (SAM) and the Chemistry and Mineralogy (CheMin) instrument, for detailed chemical evaluation.
However, the April 25 operation deviated from the script. As the rover attempted to retract its 7-foot-long (2.1-meter) robotic arm following the drilling sequence, the drill bit remained firmly lodged within the rock. Instead of the drill sliding out of the borehole, the mechanical force of the arm’s retraction lifted the entire 28.6-pound stone off the Martian surface. This resulted in the rock becoming "hitched" to the drill sleeve, a phenomenon never before documented in the rover’s 12-year tenure on Mars. While rocks have occasionally fractured or shifted during previous drilling attempts, the total adhesion of a large specimen to the drill assembly presented an immediate risk to the arm’s motors and the integrity of the drilling mechanism.
Chronology of the Rescue Mission
The resolution of the "Atacama incident" was not immediate, as NASA engineers had to account for the communication delay between Earth and Mars—which ranges from 5 to 20 minutes depending on planetary alignment—and the need to model the physics of the predicament before sending commands.
Phase One: Initial Vibration (April 25–26)
Upon realizing that the rock was suspended in mid-air, mission controllers immediately halted all autonomous movements of the robotic arm to prevent further strain. The first attempt at a solution involved a "percussive vibration" technique. Engineers commanded the drill to vibrate at high frequencies, hoping the oscillation would shake the rock loose. Despite several cycles of vibration, Atacama remained stubbornly attached to the drill sleeve.
Phase Two: Reorientation and Secondary Vibration (April 27–29)
Following the failure of the initial vibration, the JPL team spent several days analyzing telemetry data and images captured by the rover’s Hazard Avoidance Cameras (Hazcams). On April 29, a new set of commands was uploaded. The objective was to change the angle of the robotic arm to utilize Martian gravity more effectively. By reorienting the drill assembly, engineers hoped to shift the rock’s center of mass. While this maneuver caused a small amount of Martian sand and debris to fall from the rock, the main mass of Atacama remained stuck.
Phase Three: The Multi-Action Solution (April 30–May 1)
By the end of April, the situation had become critical. The inability to use the drill would effectively end the rover’s primary mission of analyzing subsurface mineralogy. On the sixth day of the ordeal, engineers devised a more aggressive strategy. This involved a simultaneous combination of tilting the drill assembly to a steeper angle, rotating the drill bit, and engaging the percussive vibration motor.
According to NASA’s mission logs, this multi-faceted approach worked almost instantly. As the drill bit began to spin and vibrate while tilted, the structural integrity of the Atacama rock failed. The rock fractured into several pieces and fell to the ground, finally releasing the rover’s arm. Subsequent diagnostic tests confirmed that the drill bit, the sleeve, and the arm’s five joints remained fully operational and within expected performance parameters.
Technical Context: The Curiosity Drill System
To understand the severity of the Atacama incident, one must consider the complexity of Curiosity’s drilling hardware. The rover utilizes a rotary-percussive drill located at the end of its robotic arm. This system is designed to penetrate rocks up to 2.6 inches (6.5 centimeters) deep. The drill uses a combination of rotation (like a standard hand drill) and percussion (a hammering motion) to break through the hard Martian crust.
The drill assembly is one of the most sensitive components of the rover. In 2016, Curiosity suffered a major mechanical setback when a motor in the drill feed mechanism failed, preventing the drill bit from extending and retracting. It took NASA engineers nearly a year to develop "Extended Feed Drilling" (EFD), a new method of drilling that uses the movement of the entire robotic arm to push the drill bit into the rock, bypassing the failed motor. Because the rover is already operating on a "Plan B" drilling method, any further complications—such as a 28-pound rock weighing down the arm—carry a high risk of permanent mechanical failure.
Supporting Data and Martian Physics
While a 28.6-pound rock sounds substantial, its weight on Mars is significantly lower due to the planet’s reduced gravity. Mars has approximately 38% of Earth’s gravity, meaning the Atacama rock weighed roughly 10.8 pounds-force (48 Newtons) in the Martian environment. Despite this reduction in weight, the force was still sufficient to potentially burn out the actuators in the robotic arm or bend the drill bit, which is made of a specialized hardened steel alloy.
The geology of the Gale Crater also played a role in this event. Curiosity is currently exploring the "sulfate-bearing unit" on Mount Sharp, a region rich in minerals that formed as Mars began to dry out billions of years ago. The rocks in this area are often composed of hardened mudstones and sandstones that can be surprisingly "sticky" or prone to catching on drilling equipment due to their mineral composition and the way they fracture under pressure.
Broader Implications for the Mission
The successful recovery of the drill is a significant victory for NASA’s Mars Exploration Program. Curiosity, which landed in August 2012, is currently in its fourth mission extension. Its primary goal is to determine if Mars ever had the environmental conditions to support microbial life. Drilling into rocks like Atacama is essential to this goal, as the interior of Martian rocks is protected from the harsh surface radiation that destroys organic compounds.
The Atacama incident serves as a reminder of the inherent risks of long-term robotic exploration. As hardware ages, it becomes more susceptible to environmental hazards. The rover has already survived shredded wheels, memory glitches, and the aforementioned drill motor failure. The ability of the JPL team to remotely solve a physical obstruction 140 million miles away underscores the robustness of the mission’s operational protocols.
Future Outlook
With the drill now clear, Curiosity is expected to resume its ascent of Mount Sharp, a 3-mile-high (5-kilometer) mountain that sits in the center of the Gale Crater. The rover will continue to take "selfies," monitor Martian weather, and, most importantly, drill into new targets to piece together the history of water on the Red Planet.
NASA officials stated that the lessons learned from the Atacama incident will be integrated into future drilling operations, both for Curiosity and the newer Perseverance rover currently exploring Jezero Crater. By refining the vibration and rotation sequences used to clear obstructions, engineers can better prepare for the inevitable mechanical challenges that come with operating a car-sized robot on a distant, dusty world. For now, Curiosity remains unbowed, its robotic arm once again free to probe the secrets of the Martian past.