


The University of Würzburg has unveiled a groundbreaking prototype for planetary exploration that utilizes the unique locomotion of the African sandfish lizard to navigate the treacherous, shifting dunes of the Red Planet. This engineering feat represents a significant departure from traditional wheel designs, which have historically struggled with the fine, granular regolith found on Mars. By mimicking the "swimming" motion of the Scincus scincus, a lizard native to the Sahara Desert, the German research team has developed a propulsion system that allows a rover to move through sand as if it were a fluid, potentially solving one of the most persistent challenges in extra-planetary mobility.
The Challenge of Martian Terramechanics
For decades, the primary obstacle for robotic explorers on Mars has been the terrain itself. Martian soil, or regolith, is composed of fine-grained basaltic dust and sand that can behave unpredictably. Unlike terrestrial soil, which often contains moisture or organic binders that provide structural integrity, Martian sand is bone-dry and often loosely packed. This creates a high risk of "sinkage," where traditional circular wheels spin in place, digging the vehicle deeper into a sand trap rather than providing forward momentum.
The most notable casualty of this environment was NASA’s Spirit rover. In 2009, Spirit became hopelessly embedded in a patch of soft sand at a site named "Troy." Despite months of maneuvers and simulations by engineers at the Jet Propulsion Laboratory (JPL), the rover could not extricate itself, eventually leading to the end of its mission in 2011. Even newer rovers like Curiosity have faced significant challenges; Curiosity’s solid aluminum wheels have suffered unexpected wear and tear, including punctures and tears caused by sharp rocks and the stresses of navigating uneven sandy slopes.

The German engineering team, led by researcher Amenosis Lopez, recognized that a fundamental rethink of wheel geometry and motion was required to ensure the safety of future multi-billion-dollar missions.
Biological Inspiration: The African Sandfish
The solution to the sand trap problem came from the field of bionics—the study of biological systems to solve engineering problems. The African sandfish (Scincus scincus) is a species of skink that has evolved a remarkable method of movement. While it possesses legs for walking on the surface, it frequently dives into the sand to escape predators or the midday heat. Once submerged, it does not use its limbs to push; instead, it tucks them against its body and undulates its torso in a powerful, wave-like motion.
This "sand-swimming" allows the lizard to overcome the high drag of the granular medium. Scientific studies, including high-speed X-ray imaging conducted by institutions like Georgia Tech over a decade ago, revealed that the lizard’s body generates thrust by pushing against the sand in a way that exploits its fluid-like properties. The Würzburg team took these biological observations and translated them into a mechanical system suitable for a four-wheeled rover.
The Mechanics of the "Swimming" Wheel
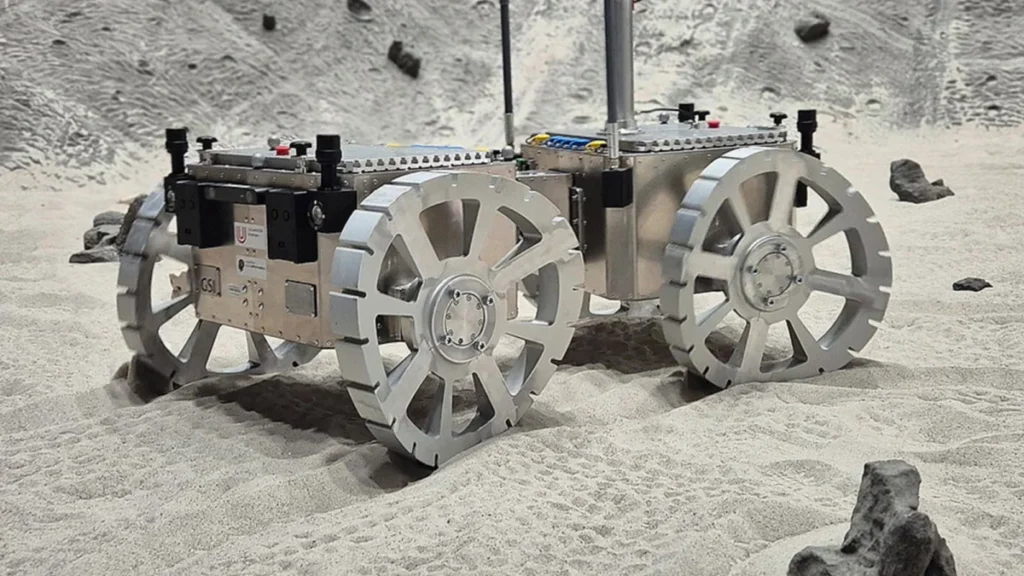
The prototype rover, roughly the size of a small refrigerator and finished in a reflective silver coating, features four specialized wheels that do not merely rotate. Instead, each wheel is mounted on a complex actuator system that allows it to move in a sinusoidal, or figure-eight, pattern.

"The wheels mimic the animal’s characteristic interaction with the ground, generating both longitudinal and lateral forces," explained Amenosis Lopez in a technical statement accompanying the release. "The rover leaves sinusoidal tracks in the sand, rather than the straight, compacted ruts left by traditional tires."
This motion is designed to exploit the "yield strength" of the sand. By cutting through the grains at specific angles and using a waving motion, the wheels generate lift and forward thrust simultaneously. This prevents the weight of the rover from concentrating in one spot, which is the primary cause of sinking. In testing, the Würzburg team demonstrated that when the rover encountered a patch of soft sand that would immobilize a standard wheeled vehicle, the swimming motion allowed it to maintain a steady, albeit slower, pace.
Chronology of Development and Iterative Design
The development of the sandfish rover followed a rigorous iterative process. The project began with a deep dive into previous research, specifically the 2011 "Sandbot" created by researchers at Georgia Tech. While the 2011 robot was a proof-of-concept for undulatory motion, the Würzburg team sought to create a more robust, heavy-duty platform capable of carrying scientific payloads.
- Phase I: Mathematical Modeling (2021-2022): The team developed complex algorithms to simulate the interaction between a rigid mechanical "fin" and Martian-simulated regolith.
- Phase II: The First Prototype (Early 2023): The first physical model was constructed. However, the team encountered an immediate setback: the rover was too heavy. The complex motors required to drive the sinusoidal motion added significant mass, causing the rover to sink immediately upon activation.
- Phase III: Material Optimization (Late 2023): The engineers returned to the design phase, focusing on reducing the mass of the chassis and increasing the surface area (width) of the wheels. This lowered the ground pressure of the vehicle.
- Phase IV: Successful Testing (2024): The current version was tested on a specialized laboratory floor filled with fine-grained sand calibrated to match the physical properties of Martian soil. The video released by the university shows the rover successfully navigating the track, turning corners, and maintaining stability on slopes.
Terramechanics: The Physics of Sand
To understand why this invention is significant, one must look at the physics of granular media. Sand is often described by physicists as a material that exists in a state between a solid and a liquid. When at rest, it can support the weight of a person or a vehicle (solid). However, when a force is applied—such as a spinning wheel—the grains can flow around the object (liquid).

Traditional wheels rely on friction and compaction. They try to turn the sand into a solid surface to push against. The sandfish rover does the opposite; it treats the sand like a fluid. By using a "swimming" stroke, the wheel creates a high-pressure zone behind it and a low-pressure zone in front of it, essentially "rowing" through the dunes. This method is far more efficient in deep, fine powder where there is nothing solid to grip.
Implications for the Future of Space Exploration
While the Würzburg rover is currently a laboratory prototype, its implications for the next generation of space exploration are profound. NASA and other space agencies, including the ESA (European Space Agency) and CNSA (China National Space Administration), are currently planning missions for the 2030s that involve human explorers and heavy cargo transport.
Standard rovers like Perseverance are limited to traveling at very slow speeds—roughly 0.1 miles per hour—partly to ensure they do not accidentally enter a sand trap that they cannot see. A "swimming" drive system could allow for more "aggressive" pathfinding, enabling rovers to take direct routes through dune fields rather than spending weeks navigating around them.
However, several hurdles remain before this technology reaches the launchpad:

- Energy Efficiency: The sinusoidal motion requires more moving parts and actuators than a simple rotating axle, which translates to higher power consumption. On a planet where every watt of solar or nuclear power is precious, this is a significant trade-off.
- Mechanical Complexity: More moving parts increase the risk of mechanical failure. Martian dust is highly abrasive and electrostatic; keeping it out of the complex joints required for "swimming" wheels will be an immense sealing challenge.
- Controllability: As the researchers noted, more work is needed to refine the steering and precision of the rover, as the sinusoidal motion can cause the vehicle to drift more than a traditional wheel.
Expert Analysis and Industry Reaction
The broader scientific community has reacted with cautious optimism. Dr. Thomas Müller, a planetary geologist not involved with the study, noted that "Bio-inspired design is no longer just a novelty; it is becoming a necessity as we move toward more rugged and unpredictable environments like the Martian southern highlands or the lunar poles."
The Würzburg team’s work also aligns with NASA’s recent interest in non-traditional mobility. The space agency has recently explored "Mars Helicopters" (Ingenuity) and is developing "DuAxel" rovers that can transform and rappel down craters. The addition of a "sand-swimmer" to the repertoire of planetary vehicles would provide mission planners with a vital tool for exploring the vast "seas" of sand that cover large portions of the Martian surface.
Conclusion
The African sandfish lizard has spent millions of years perfecting the art of desert survival. By translating the lizard’s biological mastery into a mechanical form, German engineers have provided a potential roadmap for overcoming the "Troy" traps of the future. As the University of Würzburg continues to refine the weight and efficiency of their prototype, the prospect of a "swimming" rover lead-lining the first human mission to the Martian dunes moves closer to reality. In the harsh, alien environment of the Red Planet, the most advanced solution may very well be one borrowed from the ancient wisdom of Earth’s own desert dwellers.